

Principšroubový krokový motor: k záběru se používá šroub a matice a pevná matice se používá k zabránění jejich vzájemnému otáčení, čímž se šroub může pohybovat axiálně. Obecně existují dva způsoby, jak tuto transformaci realizovat.
Prvním je zabudovat do motoru rotor s vnitřním závitem a realizovatlineární pohybzáběrem vnitřních závitů rotoru a šroubu, což se nazývá krokový motor s pronikavým šroubem. (Matice je integrována s rotorem motoru a hřídel šroubu prochází středem rotoru motoru. Při použití šroub utáhněte a proveďte protirotační pohyb. Když je motor zapnutý a rotor se otáčí, motor se bude pohybovat lineárně podél šroubu. (Naopak, pokud je motor upevněn, zatímco šroub je protirotační, pak se šroub bude pohybovat lineárně.)
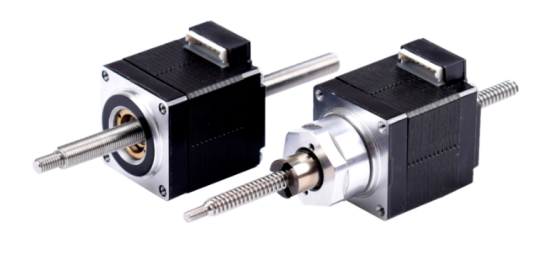
Typ s průchozí osou
Druhým je vzít sišroubProtože je hřídel motoru vnější, je motor upevněn externí maticí a šroubem, čímž se dosahuje lineárního pohybu. Jedná se o krokový motor s externím pohonem a šroubem. Výsledkem je výrazně zjednodušená konstrukce, která umožňuje přesný lineární pohyb v mnoha aplikacích přímo pomocí krokového motoru se šroubem bez instalace externího mechanického spojení. (Matice je umístěna vně motoru a je spojena s hnacím mechanismem. Když se motor otáčí, matice se lineárně pohybuje podél šroubu.)
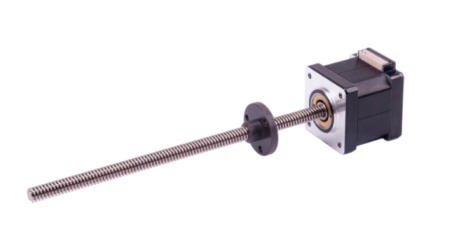
Typ externího disku
Výhody aplikace lineárního krokového motoru procházejícího osou:
Porovnání aplikačních scénářů, kde se používají externě řízené lineární krokové motory ve spojení slineární vedení, lineární krokové motory s průchozí osou mají své jedinečné výhody, které se odrážejí především v následujících 3 aspektech:
1.Umožňuje větší chybu instalace systému:
Obecně platí, že pokud se použije externě řízený lineární krokový motor, špatná rovnoběžnost mezi šroubem a upevněním vodicí lišty pravděpodobně povede k zastavení systému. U lineárních krokových motorů s průchozí osou však lze tento fatální problém výrazně zmírnit díky strukturálním vlastnostem konstrukce, které umožňují větší systémovou chybu.
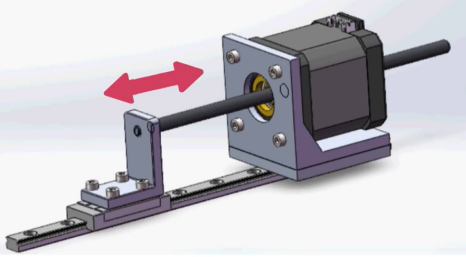
Když je motor pod napětím, matice se otáčí s rotorem a šroub je připojen k externí zátěži a pohybuje se přímočarě podél vodítka.
2.Není omezeno kritickou rychlostí šroubu:
Pokud jsou pro vysokorychlostní lineární pohyb zvoleny externě poháněné lineární krokové motory, jsou obvykle omezeny kritickou rychlostí šroubu. U lineárního krokového motoru s průchozí osou je však šroub pevný a proti otáčení, což umožňuje motoru pohánět jezdec lineárního vedení. Protože je šroub stacionární, není při dosahování vysoké rychlosti omezen kritickou rychlostí šroubu.
3.To šetří instalační prostor:
Lineární krokový motor s průchozí osou nezabírá další prostor nad rámec délky šroubu díky konstrukčnímu řešení, kde je matice zabudována do motoru. Na stejný šroub lze namontovat více motorů. Motory se nemohou „procházet“ jeden skrz druhý, ale jejich pohyby jsou na sobě nezávislé. Proto je vhodnou volbou pro aplikace s přísnějšími požadavky na prostor.
Pro více informací nás prosím kontaktujte na adreseamanda@kgg-robot.comnebo+WA0086 15221578410.
Čas zveřejnění: 11. února 2025




