
-

Krokový motor s kuličkovým šroubem v aplikaci biochemických analyzátorů
Kuličkový šroubový krokový motor převádí rotační pohyb na lineární pohyb v motoru, což umožňuje přímé připojení konzolového mechanismu k motoru, čímž je mechanismus co nejkompaktnější. Zároveň není potřeba...Číst dále -

CO JE PŘEVODOVÝ MOTOR?
Systém ovládání řazení převodovky Převodový motor je mechanické zařízení sestávající z elektromotoru a reduktoru otáček. ...Číst dále -

TRH S PŘESNÝMI KULIČKOVÝMI ŠROUBY: GLOBÁLNÍ TRENDY V PRŮMYSLU 2024
Kuličkové šrouby, jakožto důležitý mechanický převodový prvek, zahrnují trh s následnými aplikacemi především průmyslovou robotiku a potrubní systémy atd. Konečný trh je orientován především na oblasti letectví, výroby, energetiky a veřejných služeb. Globální b...Číst dále -

Humanoidní roboti podněcují růst trhu se šrouby
V současné době se odvětví humanoidních robotů těší velké pozornosti. V důsledku nových požadavků, zejména na chytrá auta a humanoidní roboty, vzrostl trh s kuličkovými šrouby ze 17,3 miliardy juanů (2023) na 74,7 miliardy juanů (2030). ...Číst dále -

Použití kuličkových šroubů v přesných lékařských zařízeních.
V moderní lékařské oblasti se používání přesných zdravotnických prostředků stalo nedílnou součástí poskytování přesnějších a efektivnějších lékařských ošetření. Mezi nimi je kuličkový šroub, jako vysoce přesná technologie řízení pohybu, široce používán...Číst dále -
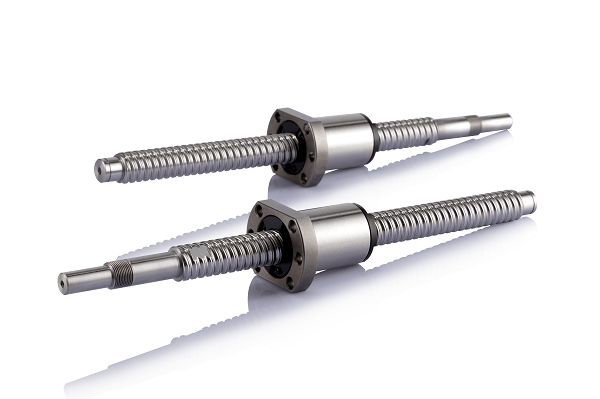
Broušení a válcování – Výhody a nevýhody kuličkových šroubů
Kuličkový šroub je vysoce účinná metoda přeměny rotačního pohybu na lineární pohyb. Toho je možné dosáhnout pomocí recirkulačního kulového mechanismu mezi hřídelí šroubu a maticí. Existuje mnoho různých typů kuličkových šroubů, ...Číst dále -

Jak krokové motory využívají pokročilé lékařské přístroje
Není žádným překvapením, že technologie řízení pohybu pokročila za hranice tradičních výrobních aplikací. Zejména zdravotnické prostředky zahrnují pohyb v široké škále způsobů. Aplikace sahají od lékařského elektrického nářadí až po ortopedické...Číst dále -
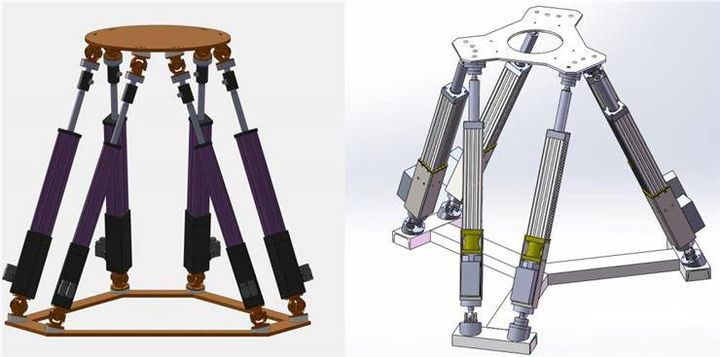
Co je to robot s volností a 6 stupni volnosti?
Struktura paralelního robota se šesti stupni volnosti se skládá z horní a dolní plošiny, 6 teleskopických válců uprostřed a 6 kulových kloubů na každé straně horní a dolní plošiny. Teleskopické válce se obvykle skládají ze servoelektrických nebo ...Číst dále
Vítejte na oficiálních stránkách společnosti Shanghai KGG Robots Co., Ltd.

Novinky z oboru
-

Nahoře




